







產(chǎn)品描述:
超高速點焊多用途機器人的終版通過追求加速性和減震性,推進輕型化、高剛性和高速控制等三個因素,實現(xiàn)節(jié)拍縮短30%,生產(chǎn)性得到飛躍性的提高。緊湊式機身可實現(xiàn)更高密度的設(shè)置,進而減輕了定期檢查或零件更換等作業(yè)的負(fù)擔(dān),還提高了維護性。

產(chǎn)品特點:
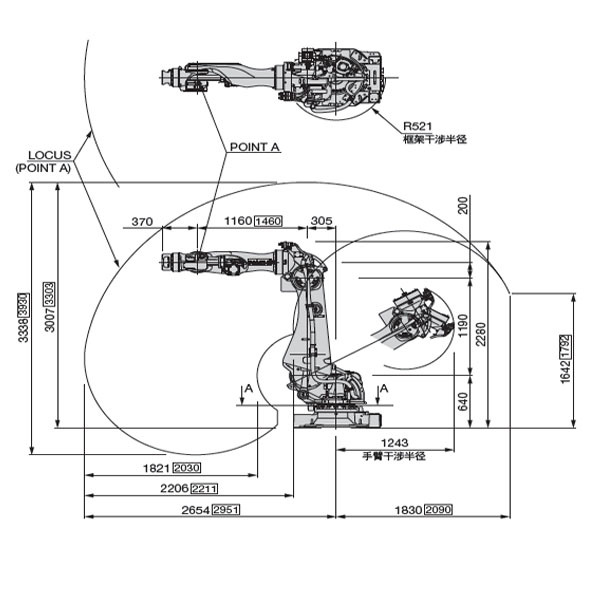
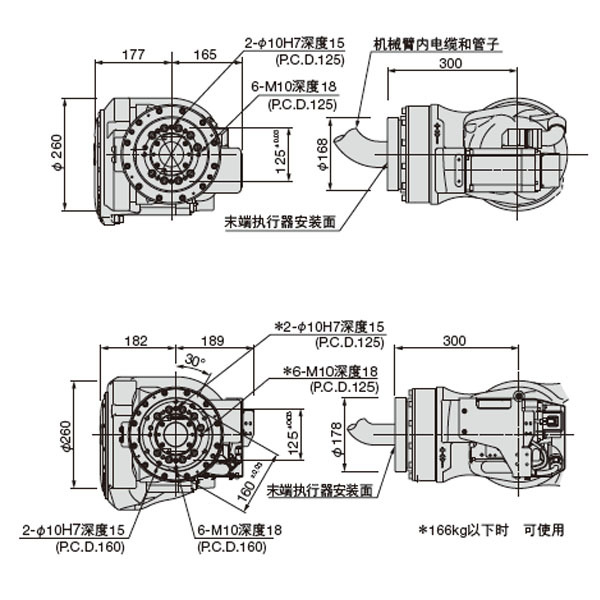
緊湊:緊湊的手臂結(jié)構(gòu),可進行高密度設(shè)置,機器人底座寬度 :500mm;框架干涉半徑 :366mm,高性能:超高速機器人SRA系列的高速控制 實現(xiàn)水平的生產(chǎn)效率,充足的搬運能力,可搬重量 :100kg;手腕扭矩 :580N??m(J4/J5軸)

產(chǎn)品參數(shù):
|
機器人型號 |
SRA100B-01 |
SRA100J-01 |
SRA100-01 |
SRA100-01A |
|||
|
結(jié)構(gòu) |
關(guān)節(jié)型 |
||||||
|
關(guān)節(jié)數(shù) |
6 |
||||||
|
驅(qū)動方式 |
AC伺服方式 |
||||||
|
大 動 作 范 圍 |
臂 |
J1 |
旋回1 |
±180° |
|||
|
J2 |
前后 |
-120°~ +60° |
-80°~ +60° |
||||
|
J7 |
旋回2 |
- |
|||||
|
J3 |
上下 |
-150°~ +180° |
-125° ~ +90° |
-146.5°~ +150° |
|||
|
手腕 |
J4 |
回轉(zhuǎn)2 |
±360° |
||||
|
J5 |
彎曲 |
±135° |
|||||
|
J6 |
旋轉(zhuǎn)1 |
±360° |
|||||
|
大 速 度 |
臂 |
J1 |
旋回1 |
136°/s |
|||
|
J2 |
前后 |
110°/s |
115°/s |
135°/s |
|||
|
J7 |
旋回2 |
|
|
|
|||
|
J3 |
上下 |
130°/s |
160°/s |
135°/s |
|||
|
手腕 |
J4 |
回轉(zhuǎn)2 |
240°/s |
||||
|
J5 |
彎曲 |
233°/s |
|||||
|
J6 |
回轉(zhuǎn)1 |
351°/s |
|||||
|
可搬質(zhì)量 |
手腕部 |
100kg |
|||||
|
手臂上 *1 |
25kg (大45kg) |
45kg(大90kg) |
|||||
|
手腕容許 |
J4 |
回轉(zhuǎn)2 |
580N·m |
||||
|
J5 |
彎曲 |
580N·m |
|||||
|
J6 |
回轉(zhuǎn)1 |
290N·m |
|||||
|
手腕容許大 |
J4 |
回轉(zhuǎn)2 |
45kg·m2 |
60kg·m2 |
|||
|
J5 |
彎曲 |
45kg·m2 |
60kg·m2 |
||||
|
J6 |
回轉(zhuǎn)1 |
22.7kg·m2 |
30kg·m2 |
||||
|
大工作半徑 |
2,071mm |
1,634mm |
2654mm |
||||
|
位置反復(fù)精度 *3 |
±0.1mm |
||||||
|
設(shè)置方法 |
地面安裝 |
||||||
|
設(shè)置條件 *4 |
周圍溫度 : 0~45°C周圍濕度 : 20~85% RH (應(yīng)無結(jié)露)安裝面的容許振動 : 0.5G (4.9m/s2) 以下 |
||||||
|
主體質(zhì)量 |
690kg |
670kg |
960kg |
||||







 免責(zé)聲明:(1)以上所展示的信息由企業(yè)自行提供,內(nèi)容的真實性、準(zhǔn)確性和合法性由發(fā)布企業(yè)負(fù)責(zé),環(huán)球塑化網(wǎng)對此不承擔(dān)任何保證責(zé)任。我們原則上建議您優(yōu)先選擇“塑企通”會員合作! (2)同時我們鄭重提醒各位買/賣家,交易前請詳細(xì)核實對方身份,切勿隨意打款或發(fā)貨,謹(jǐn)防上當(dāng)受騙。如發(fā)現(xiàn)虛假信息,請向環(huán)球塑化網(wǎng)舉報。
免責(zé)聲明:(1)以上所展示的信息由企業(yè)自行提供,內(nèi)容的真實性、準(zhǔn)確性和合法性由發(fā)布企業(yè)負(fù)責(zé),環(huán)球塑化網(wǎng)對此不承擔(dān)任何保證責(zé)任。我們原則上建議您優(yōu)先選擇“塑企通”會員合作! (2)同時我們鄭重提醒各位買/賣家,交易前請詳細(xì)核實對方身份,切勿隨意打款或發(fā)貨,謹(jǐn)防上當(dāng)受騙。如發(fā)現(xiàn)虛假信息,請向環(huán)球塑化網(wǎng)舉報。
 簡繁切換
簡繁切換